Suite à un autre sujet... Bon, en ce qui concerne le "stacking" et le "rejet"...

Si on revoyait la théorie ?

D'abord, le plus simple :
"
Sum Stacking"
C'est la façon la plus simple... On garde chaque pixel (valeur en 32 bits) et une fois additionnés,
on réduit le résultat (en le normalisant) sur 16 bits. Rem : "normalisation" redistribue les valeurs, ne "coupe" pas...
On estime l’évolution du bruit comme égal à √N (N= nombre d'images)
A seulement utiliser à pour le traitement planétaire. L'addition via "somme" peut être largement
parallélisé pour augmenter la vitesse de traitement des images (en video, par exemple).
"
Average Stacking With Rejection" :
On additionne en gardant une valeur "moyenne" en cours de calcul (ce qui évite les "débordements").
On peut rejeter les pixels estimés "déviants" (soit interactivement, soit automatiquement)
Pour pouvoir "rejeter", plusieurs méthodes de détermination :
- "
Percentile" : bien pour des petits "set" d'images, on élimine les valeurs extrêmes....
- "
Sigma" : la "bonne à tout faire", on rejette les pixels dont la "distance" par rapport à la moyenne
est trop grande par rapport à une valeur donnée (le sigma)
- "
Median Sigma" : la même chose, mais au lieu de "supprimer", on remplace par la valeur moyenne
de la région concernée.
- "
Winsorized Sigma" : idem, mais une variante supposée plus "fine" dans l'évaluation
- "
Linear Fit" : on prend toutes les valeurs, on trace la distribution, la tendance (pente) et on rejette
tout ce qui se trouve d'un côte ou l'autre de la ligne. C'est bon pour les grandes images, si un satellite
se balade dans l'image, il est rapidement éliminé.
Ok, là, on supprime les pixels "déviants", ensuite, on doit calculer la "moyenne" en additionnant...
Ce calcul de "moyenne" peut être :
- "
Mean Stacking" : avec dark/flat/offset,.le plus simple, basé sur la moyenne simple des pixels de toutes les images
- "
Median Stacking" : l'habituel, avec dark/flat/offset. Pour un pixels, la valeur médiane de tous les pixels présents à cet endroit.
(remarque : on estime l’évolution du bruit comme égal à 0.8√N (N= nombre d'image).
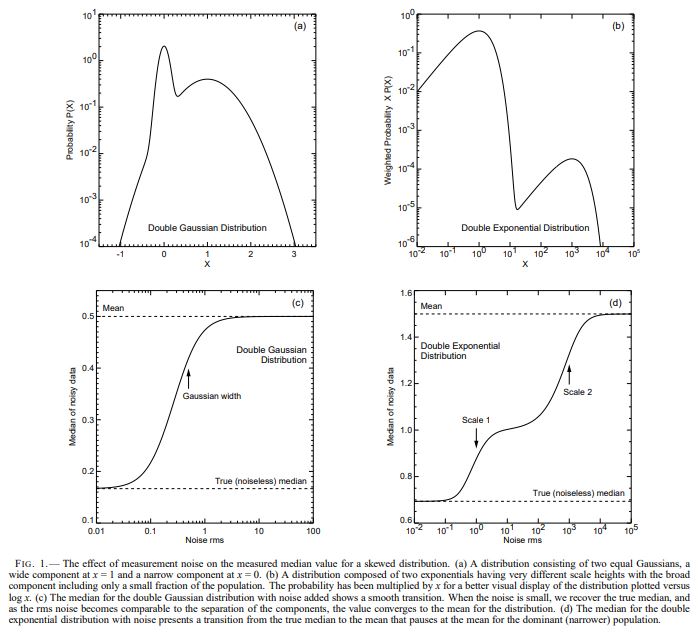
Donc, si on compare les deux méthodes
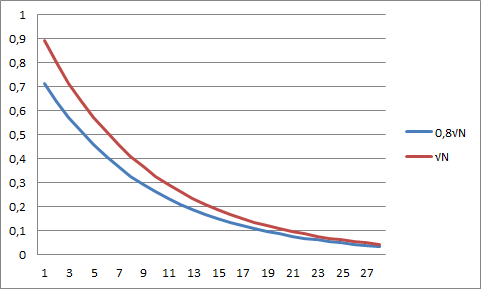
Avantage versus inconvénient, par exemple :
https://arxiv.org/pdf/astro-ph/0607335.pdf
- "
Pixel Maximum Stacking" : intéressant pour construire des "filés d'étoiles"...
Les pixels de l'image sont remplacés par la valeur qui est maximale dans toutes les images empilées.
- "
Pixel Minimum Stacking" : utile pour les "bord noirs"... L'inverse du précédant,
les pixels de l'image sont remplacés par la valeur qui est minimale dans toutes les images empilées.
- "
Entropy" : entropy = - sum( (probability of value) * log2( probability of value) )
et
Probability of value = (number of occurrences of value) / (total number of pixels)
=> que généralement dans les traitements d'images (du genre "dynamic objets")
- "
Kurtosis" : kurtosis = ( sum( (value - mean) ) all pixels ) / ( ( number of all pixels - 1 ) * (standard deviation all pixels) ).
On mesure le type de courbe (pente, resserrement) par rapport à une distribution normale depuis toutes les images.
Une distribution normale : Kurtosis=3.0. Si > 3 = une "pointe", si <3 = un "aplati".

Des options possibles sur l'addition :
- la "
Normalization" : on l'applique sur chaque image avant addition. On va adapter le "fond" moyen des images sur
toutes les images fournies à l'entrée. Ensuite, on additionne.
- le "
Scale" : on adapte le fond via une évaluation (moyenne) de toutes les images, cette évaluation veut améliorer
le rapport signal/bruit pour chaque pixel.
Remarque : les "offset" et "dark" (standard et masters) ne doivent évidemment pas être traitées par une de ces options.
- "
No normalization" : on garde les images identiques à l'entrée.
Remarque : un bel exemple des effets d'addition (hors astro)
http://www.tubbygaijin.com/photography-2/photoshop-dabbling-stacking/
il y a encore d'autres méthodes, je compléterai au fur et à mesure...



 , le software m'intéresserait tout de même)
, le software m'intéresserait tout de même)